"Augmented Body and Virtual Body"
was performed in, "Utopiales," a festival in
Nantes, France in November 9, 2005.
Suguru Goto: Concept and Composition
Yann Bertrand: 3D Image
Ippei Hosaka: BodySuit Performance
François Leonarte: Stage Direction
Michèle Trotta: Coordinator
François Leonarte and Antonin Artaud: Voice
Texts: "A Thousand Plateaus" by Gilles Deleuze &
Felix Guattari, and "To Have
Done With The Judgment Of God" by Antonin Artaud
Abstract
This work is intended to apply to
the system, which combines "BodySuit" and "RoboticMusic,"
as well as its possibilities and its uses in an artistic application.
"BodySuit" refers to a gesture controller in a Data
Suit type. "RoboticMusic" refers to percussion robots,
which are applied to a humanoid robot type.
1. Introduction
The system, which I used in this
work, contains both a gesture controller and automated mechanical
instruments at the same time. In this system, the Data Suit, "BodySuit"
controls the Percussion Robots, "RoboticMusic" in real
time. "BodySuit" doesn’t contain a hand-held controller.
A performer, for example a dancer wears a suit. Gestures are transformed
into electronic signals by sensors. "RoboticMusic" contains
5 robots that play different sorts of percussion instruments.
The movement of the robots is based
upon the gestures of the percussionist. Working together with
"BodySuit" and "RoboticMusic," the idea behind
the system is that a human body is augmented by electronic signals
in order to be able to perform musical instruments interactively.
This system was originally conceived in a project to realize a
performance / musical theater composition.
2. General
Description
This system is originally intended
to be utilized in a project, which is entitled, "ArtificialBody
and Real Body." The theme is to explore this dualism and
the relationship between artificiality and reality of human body
in a context of musical theater. Artificiality and reality sometimes
seem to be conflicted with each other, but they can work together,
or their meaning can be transformed for an audience depending
on the context. The context provokes the audience to play with
the ideas of reality and artificiality. A performance involving
"RoboticMusic" and "BodySuit" challenges the
audience by confusing the line between virtual and reality. I
am a composer and intend to create this composition, which emphasizes
the importance of performance aspects with this system.
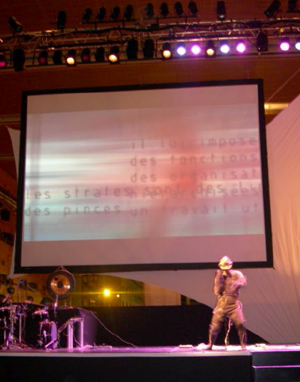
This project originally started
in 2002. This system is intensively experimented with and was
shown on several occasions during 2005. The last performance was
realized in, "Utopiales," a festival in Nantes, France
in November 2005 (Fig.1).
 |
|
Fig.1: A performance with "BodySuit"
and "RoboticMusic". A photo from its rehearsal.
© Utopiales |
"BodySuit" was first created by an electronic engineer
Patrice Pierrot, in 1997. Although it was originally conceived
to work with "RoboticMusic," it had to wait many years
until "RoboticMusic" was ready. Meanwhile, many possibilities
of "BodySuit" were explored, for instance, it was experimented
with to control computer generated sounds and video images (Fig.
2).
 |
| Fig.2:
BodySuit can also control sounds and video images in real
time. |
"RoboticMusic" was created in 2003. The original concept
and the design were done by me, and the robots were realized by
a humanoid robot specialist, Fuminori Yamazaki, of the iXs Research
Corporation in Japan. The project is still a work in progress;
the goal is to eventually form a robot orchestra.
A gesture of performer with "BodySuit"
is translated to gestures of "RoboticMusic." Instead
of having a computer-generated sound, one can interactively have
an acoustic percussion sound. One of the important elements is
the relationship and the communication method explored within
this system. One may consider "BodySuit" and "RoboticMusic"
as a relationship between a conductor and an orchestra, where
dance-like gestures merely trigger instruments. In other words,
this is an instrument that relies on physical gestures.
Another point is the method of translation
used by the computer. For example, signals from "BodySuit"
are transformed by Mapping Interface and Algorithm in a computer,
and then are sent to "RoboticMusic." One gesture may
trigger one attack on one instrument. However, it is also possible
to trigger 5 instruments at the same time. Otherwise complex musical
data, which is automatically generated by a computer and then
reproduced by "RoboticMusic," is altered by gestures
with "BodySuit" to modify the parameters of algorithm
in real time.
3. Detailed
Description of Percussion Robots – "RoboticMusic"
RoboticMusic contains 5 robots (Fig.3),
which play percussion instruments, such as a Gong, Bass Drum,
Snare Drum, Tom-Tom, or Cymbal. These instruments can be replaced
as long as the replacement instruments can be played with Mallets
(Fig.3).
 |
| Fig.3:
RoboticMusic. From the left to right, Gong, Bass Drum,
Tom-toms, Snare, Pipes.
© Raphaël Chipault |
One of robots plays numerous pipes, and rapidly spins to create
Flute-like sounds, which are generated while the air goes through
them. These pipes are different lengths according to the pitches
one desires. As it spins faster, the pitches become higher as
following an overtone series (Fig.4).
 |
| Fig.4:
Pipe Robot appears behind the Cymbal Robot on this photo.
Pipe robot changes
the pitches according to the speed of spins. |
The latest technology of humanoid robots is applied to this, but
"RoboticMusic" doesn’t walk on two feet, nor does
it contain eyes, a mouth, etc. "RoboticMusic" does contain
robot’s arms. The gesture of a human percussionist is modeled
in order to have musical sound and expression. Yet a robot can
perform without any rest, more precisely and faster than a human
being. Max, Cycling’74 is utilized as an interface and to
generate musical data. With this, one can also send basic parameters
to the robots, such as a position of the robot’s arm, an
offset position, intensity (how hard it hits) and so on. This
sends the signals to another computer with Linux via UDP. Software
in Linux is developed by iXs Research Corporation. This has an
important roll, since it controls the movement of robot. From
the computer with Linux to the robots, these are connected via
USB. Each robot has its own interface, which is connected with
an actuator and a sensor. The robot has a special sort of springs
to imitate a human muscle. Each holds a mallet at the end of his
arm (Fig.5).
 |
| Fig.5:
There is a special sort of springs in the arm of the robot.
At the end of this, it
holds a mallet. |
The major advantage to "RoboticMusic" is that it interactively
plays an acoustic instrument with the aide of a computer. There
is no problem to play complex rhythm and it easily goes beyond
the limit of human performance capabilities. Therefore, it gives
new potentialities in a composition for acoustic instruments.
Another point is an acoustic sound.
While a computer generated sound has many capabilities, an acoustic
instrument has rich sonority and enormous possibilities of expression,
especially from the point of view of a composer. When it is played
on a stage, the vast possibilities of the acoustic aspect are
obvious when compared to sound coming from speakers. Another benefit
is that the audience may observe both sound
and its gesture of performance.
To master one instrument is huge
task for a musician, but to play together with others in an ensemble
is another difficulty. Having 5 robots, one may extend the new
possibilities of ensemble. For example, "RoboticMusic"
allows 5 different tempos at the same time, or intricate accelerando
and ralentando, but theses are exactly synchronized in music.
There is not only an artistic advantage
with "RoboticMusic", but also a research aspect. As
one works more with a robot, which works with the gestures of
a musician, one can discover how a human gesture contains complex
movement, although it sometimes looks fairly simple, for instance,
the gesture to hit a percussion instrument. A musician knows how
to play an instrument, but he may find it difficult to explain
exactly how he controls each part of his muscles and bones, and
how he increases and reduces speed and intensity instinctively
within a very short instant.
When one hears the word, "robot",
one is perhaps reminded of an industrial robot, or maybe sometimes
a robot in a science fiction movie. However, it is not the case
here. This is due to the latest development of artificial intelligence
and is the case of application to hardware. This has a lot to
do with the robot, which performs instruments with a human-like
gesture. In particular it refers to the humanoid type of robot
that contains sensors and advanced programming, which allows the
robot to control itself automatically. It differs from the slave
type robot in a factory, and at last we can profit from this in
the field music. One may consider these robots as collaborators
with humans.
4. Detailed
Description of Gesture Controller – "BodySuit"
"BodySuit" has 12 sensors,
which are placed on each joint of the body, such as a wrist, an
elbow, a shoulder on the left and right arm an ankle, a knee,
and the beginning of the left leg and right leg. The bending sensors
are placed on the outer sides of the arms and on the front sides
of the legs and fixed on a suit. Each sensor is connected with
a cable to a box, and then it is connected with A/D interface.
A performer wears this suit, but doesn’t hold a controller
or any instruments in his hands (Fig.6).
 |
| Fig.6:
Upper half of body with BodySuit. The 12 bending sensors
are placed on each
joint of body. |
Therefore, his gesture doesn’t
have to be based upon playing an instrument, but could be liberated
to become a larger gesture, like a mime. This allows for collaboration
with a person in a different field, for instance a dancer or an
actor.
The audience easily observes this
larger movement. That is to say it can be well adapted to a performance
and musical theater situation. One may consider this as a body
instrument. This efficiently works in a percussionistlike gesture.
This is one of the best controller conjunctions with RoboticMusic.
Since this is not like a physical
controller or instrument, which is held by hands, it allows to
be collaborated with the idea, " Augmented Body" or
"Extended Body" in the work. His body is amplified by
electric signals to control something remotely or to be extended
from his abstract gesture to a meaningful gesture.
5. The system
in "Augmented Body and Virtual Body"
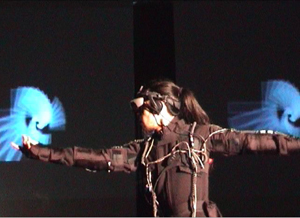
The system of BodySuit and RoboticMusic
is much explored within the last work, "Augmented Body and
Virtual Body"(Fig.7).
 |
Fig.7:
The performance of "Augmented Body and Virtual Body"
in Nantes, France, in November 2005.
© Utopiales |
In this work, the gestures with
"BodySuit" are translated or altered by the algorithm
in a computer, and then are sent to "RoboticMusic."
The interesting point is an idea of programming in order to alter
one gesture to another state. For example, one single movement
with a left elbow appears to be hitting a percussion instrument
in the air. This triggers "RoboticMusic," which plays
5 percussion instruments from left to right in a space with a
gradual slight delay on each. However, with the rising of a right
shoulder, it changes the amount of delay to play in the order
of left to right alternatively. The other case is one gesture
translated into one gesture. A gesture with an arm in "BodySuit"
is completely imitated by an arm of a robot, like someone copying
another person. The method of communication has a great deal of
importance here. In this sense, "BodySuit" and "RoboticMusic,"
two of them, but with a computer, three of them should be perhaps
regarded as one system.
Since this is done in stage work,
the fact, "gesture vs. gesture" should be much considered.
The gesture with "BodySuit," which doesn’t emit
any sound by itself, is related with the gesture with "RoboticMusic,"
which is intended to create sound. In terms of interaction, the
visual aspect between one gesture and another gesture provides
clearer feedback and brings a different and interesting dimension.
Incidentally, this communication does not refer to the one between
the first person to another. In this case, the communication means
the point of view from a third person to observe this relationship
objectively.
6. Application
of work
This system was applied to a performance / musical theaters work
in a composition (Fig.8).
 |
Fig.8:
This system is applied to a music theater work. There
is a 3D image (by Yann Bertrand) behind RoboticMusic.
© Utopiales |
At the end, this provides a lot of further and newer possibilities
than I originally expected. While the communications of gesture
with "BodySuit" and the gesture with "RoboticMusic"
are observed, one notices different phases, which are the interaction
and its perception, and the interaction with its consciousness.
These two poles are the important keys in this field. With this
articulated visual and oral experience in this work, one may cognate
different experiences that constantly deal with something to expect,
to understand, to notice, and to perceive.
Furthermore, the relationship between
gesture and sound are also regarded by a very different view with
this system. In other words, the idea, "music to see, visibility
to hear" brings a different context in a theatrical performance.
While the concept, "Extended
Body" was conceived to be realized with this system, the
theme "Augmented Body and Virtual Body" is meant to
question what a human body is and what his own identity is with
this. Man and Machine seems to be dualistic, in which one may
think that these are conflicted each other. Here, they coexist
within this system, in fact, it is more correct to say that these
are regarded as being one, "Extended Body". Therefore,
our identity is not merely within our own body, but may communicate
with outside and may be extended.
7. Conclusion
Historically, art has been always
relating with a society where it exists, and has been always profiting
from contemporary culture. As mentioned earlier, the robot here
means the application of the latest development of artificial
intelligence. Robotized instruments may have a lot of possibilities
with this. At this point, this "Extended Body" is a
reflection of society, especially where I grew up, in Japan. This
is not an abstract image, but is
just practically realized technically and aesthetically.
These technical possibilities and
the aesthetic points have created further new potentialities by
this system; however, this is not my only goal. While interacting
with this system and myself, creating a new language and its perception
are the most important goal in terms of a composition.
Furthermore, one may consider again
that his own identity is not merely limited within his possessed
body. While doing this "Extended Body", one may perhaps
ask, if such an identity really exists or not, since there is
not much limit or borderline to extend. Music has to progress
anyway, or it goes further by itself, whether we want it to or
not. Likewise, a definition of music is limitless. Perhaps co-existence
with this "Extended Body" may help to develop new possibilities
in the composition of music.
8. Acknowledgments
I would like to thank Patrick Gyger
(Utopiales), Fuminori Yamazaki (iXs Research Corporation), Patrice
Pierrot, Alain Terrier (IRCAM), and IRCAM for their assistance
in the realization of this project.
|
